الکتروموتور سه فاز القایی چیست؟ راههای کنترل سرعت الکتروموتور القایی سه فاز چیست؟
الکتروموتور سه فاز القایی (Induction three-phase motor)چیست؟
الکتروموتور سه فاز القایی به موتور های الکتریکی گفته می شود که بر خلاف الکتروموتور تکفاز،
که تنها از فاز و نول تغذیه می شود از برق سه فاز جهت حرکت بهره می گیرند.
این نوع الکتروموتورها را از این جهت القایی می گویند که، ولتاژ در روتور در اثر القا در سیم پیچ های روتور ایجاد می شود نه مانند موتورهای DC بوسیله اتصالات فیزیکی از بیرون روتور. دو نوع مختلف روتور الکتروموتور القایی وجود دارد که داخل استاتور قرار می گیرند.
-
روتور قفس سنجابی یا روتور قفسی
روتور قفس سنجابی از یک سری میله هادی تشکیل می شود که در شیارهای سطح روتور قرار دارندو در دو طرف با حلقه های اتصال کوتاه کننده به هم متصل می شوند. این طرح روتور به این دلیل قفس سنجابی نامیده می شود که مجموعه میله های هادی شبیه چرخهایی هستند که سنجابها روی آن می ذوند.
-
روتور سیم پیچی شده
الکتروموتور سه فاز القایی با روتور سیم پیچی شده مجموعه کاملی از سیم پیچی های سه فاز دارندکه معمولا اتصال ستاره (Y) دارند و انتهای سه سیم پیچ روتور به حلقه های لغزان محور روتور متصلند.
مفاهیم اساسی و طرز کار الکتروموتور سه فاز القایی
اساس کار الکتروموتور های القایی (Induction motor) بر مبنای القای ولتاژ در سیم پیچ های روتور می باشد.
بدین صورت که پس از اعمال ولتاژ سه فاز به استاتور، یک مجموعه جریان سه فاز از آن می گذرد. این جریانها یک میدان مغناطیسی ایجاد می کنند که در جهت ساعتگرد (CW) با سرعتی معادل nsync= 120f/p می چرخد.
nsync : سرعت چرخش میدان مغناطیسی یا همان سرعت سنکرون می باشد
f : فرکانس ولتاژ اعمالی به استاتور می باشد
p : تعداد قطبهای موتور می باشد
این میدان مغناطیسی دوار (Rotary magnetic field) یا (Bs) میله ها (سیم پیچ های) روتور را قطع کرده و ولتاژی در آنها القا می کند.
ولتاژ القایی در میله های روتور بصورت سه فاز و متقارن بوده و چون معمولا بصورت ستاره (Y) متصل هستند، یک جریان در هادیهای روتور جاری می شود. جریان روتور میدان مغناطیسی روتور را ایجاد کرده و در نهایت یک گشتاور در جهت پاد ساعتگرد به محور روتور اعمال می کند.
ولتاژ القا شده در میله های روتور به سرعت روتور نسبت به میدانهای مغناطیسی بستگی دارد. بدین معنی که هر چه سرعت روتور (nm) نسبت به سرعت چرخش میدان مغنازیسی (nsync) کمتر باشد ولتاژ القا شده در روتور بیشتر شده و سرعت روتور نیز دائم در حال افزایش می باشد. اختلاف سرع سنکرون با سرعت روتور(سرعت موتور) را سرعت لغزش ماشین می گویند. nslip= nsync – nm
nslip : سرعت لغزش
nsync : سرعت چرخش میدان مغنازیسی یا سرعت سنکرون
nm : سرعت موتور
اصطلاح دیگر که برای توصیف حرکت الکتروموتورهای سه فاز القایی به کار می رود لغزش است. در واقع لغزش سرعت نسبی بیان شده بر مبنای درصد استو به صورت زیر تعریف می شود.
s = nslip/nsync
علت استفاده روز افزون از الکتروموتور سه فاز القایی در صنایع مختلف
همانگونه که در فوق بدان اشاره شد بیشتر الکتروموتور های سه فاز القایی، از نوع قفس سنجابی می باشند این الکترو موتورها با برخورداری از ویژگی هایی همچون کاربرد آسان، قیمت مقرون به صرفه، هزینه نگهداری کم، استحکام مناسب و امکان طراحی گوناگون از نظر مکانیکی، در بسیاری از صنایع به کار برده می شوند.
معایب الکتروموتور سه فاز القایی
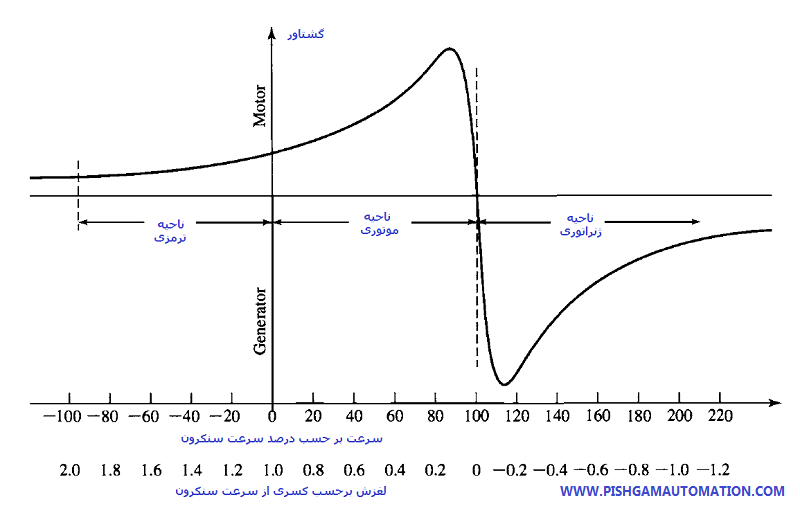
در باب مزایا الکتروموتور سه فاز القایی بحث شد، ولی این دینام های سه فاز یک عیب بسیار بزرگ دارند
و آن این است که در سرعت های پایین تر از سرعت نامی گشتاور آنها افت می کند
(شکل پایین)، مخصوصا در لحظه راه اندازی برای بارهایی که نیاز به گشتاور راه اندازی بالا و یا گشتاور ثابت دارند، عملا کاربردی ندارند.
ولی امروزه با پیشرفت تکنولوژی نیمه هادی ها (Semiconductor) و استفاده از مبدل های نیمه هادی، در تولید درایو موتورهای AC (اینورتر) استفاده الکتروموتور های سه فاز القایی از انعطاف پذیری بسیار بالایی برخوردار شده بگونه ای که جای الکترو موتورهای DC را در صنعت گرفته است. امروزه درایو الکتروموتور های سه فاز القایی جهت کنترل سرعت، گشتاور، موقعیت، حرکت آرام، بار افزایشی و پیکربندی های سفارشی طراحی گردیده است و تقریبا تمامی نیازها با کاربردهای صنعتی و غیر صنعتی را پوشش می دهند.
تنظیم سرعت الکتروموتور سه فاز القایی
همانطور که در فوق اشاره شد سرعت موتور القایی ضریبی ار سرعت سنکرون می باشد
و سرعت سنکرون از فرمول زیر محاسبه می گردد.
nsync= 120f/p
nsync : سرعت چرخش میدان مغناطیسی
f : فرکانس ولتاژ اعمالی به استاتور
p : تعداد قطبهای موتور
بنابراین ما جهت کنترل سرعت موتور القایی یا باید فرکانس را تغییر دهیم یا تعداد قطهای موتور را. تغییر تعداد قطبهای موتور فقط در اتصال دالاندر امکان پذیر می باشد که با نصف شدن تعداد قطبها سرعت دو برابر می شود. معمول ترین راه برای کنترل سرعت الکتروموتورهای القایی آسنکرن کنترل فرکانس می باشد. کنترل فرکانس اعمالی به موتورهای القایی به کمک درایوهای فرکانس متغییر (Variable Frequency Drive) که به اختصار VFD نامیده می شوند انجام می شود.
شرکت های فعال در ساخت درایو
باگسترش روز افزون کاربرد درایوهای ماشین های AC (اینورتر) شرکت های گوناگون الکترونیکی اقدام به ساخت این درایو ها کرده اند. شرکت هایی چون. SIEMENS ,ABB,SEW ,DELTA ,LENZE ,MITSUBISHI و… در این زمینه تلاشهای قایل تحسینی انجام داده اند. در این بین شرکت دلتا الکترونیک تایوان با ارائه سری های متنوع از اینورتر های خود که با نام اختصاری (VFD) شناخته می شوند توانسته تمام نیازهای کاربران خود را پوشش دهد. شرکت دلتا الکترونیک که دارای سبد محصولات کاملی از تجهیزات اتوماسیون صنعتی می باشد توانسته محصولاتی قابل رقابت به بازارهای جهانی عرضه کند.
امروزه با گسترش و تخصصی تر شدن کاربردها الکتروموتور سه فاز القایی ، اینورتر ها هم تخصصی شده
و جهت کابردهای خاص همچون آسانسور ها، پمپ ها و یا جهت کنترل گشتاور، سرعت، موقعیت
و یا ترکیب آنها و…، اینورتر های خاص تولید می گردد. بعنوان نمونه شرکت دلتا الکترونیک دارای اینورتر های با مدل های مختلف چون سری های
VFD-VE
VFD-M
VFD-E
VFD-F
VFD-B
VFD-S
VFD-EL
VFD-C2000 و… می باشد که هرکدام دارای قابلیت متنوعی بوده و جهت کاربرد خاصی بکار می رود

خسته نباشید مرسی به خاطر این مطلب
مفید